"장애물을 인식 자동차 프로그래밍"에서 조립된 자동차가 장애물을 피해서 주행하도록 만들어 봅시다.
사전 준비
- 조립된 자동차와 아두이노 보드
- 아두이노와 연결 가능한 PC와 IDE
배우게 될 것
- 장애물과의 거리를 측정해서 자동차의 속도를 결정하는 방법
- 장애물을 만났을 때 LED와 Buzzer를 사용해서 빛과 소리를 내는 방법
- 장애물이 사라지지 않을때 방향을 전황해서 이동하는 방법
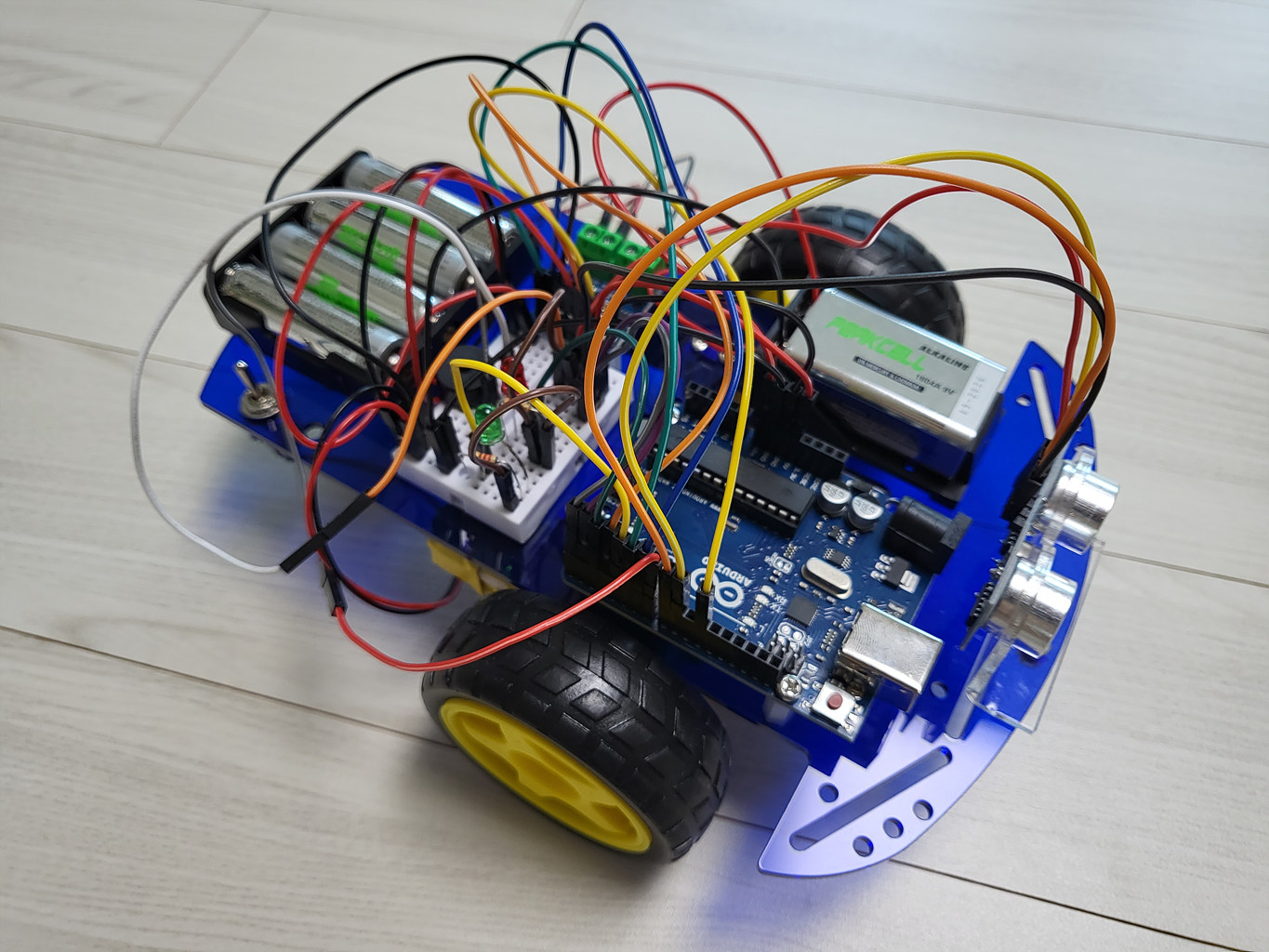
"장애물을 인식 자동차 프로그래밍"에서 조립한 자동차에 추가로 LED를 연결합니다.
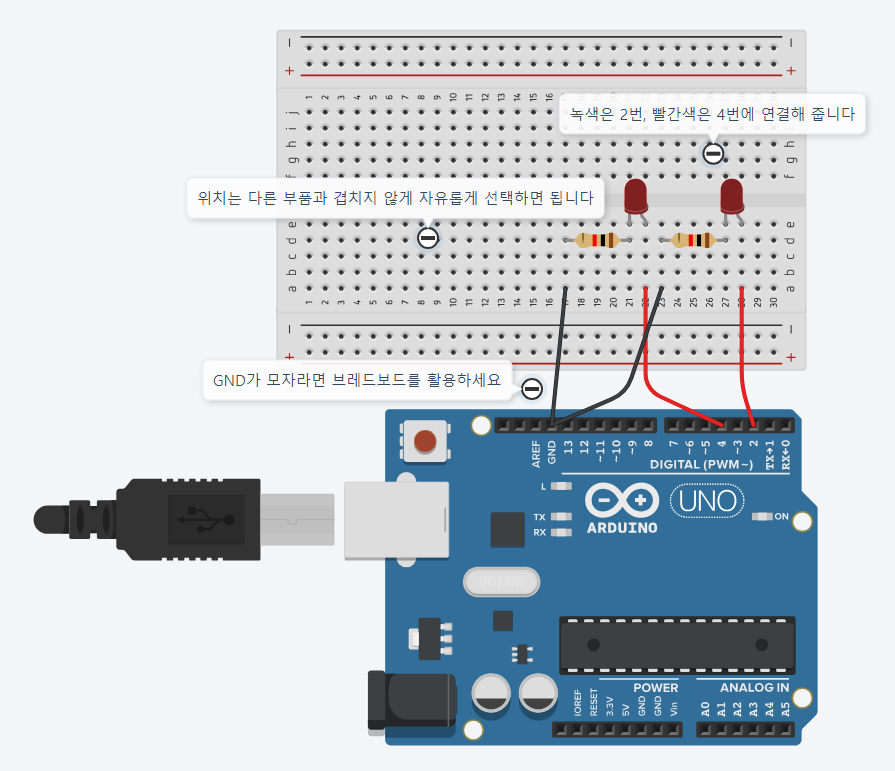
LED 불 빛이 동작하도록 붉은 색과 초록 색 LED를 각각 저항과 함께 회로에 연결해 줍니다.
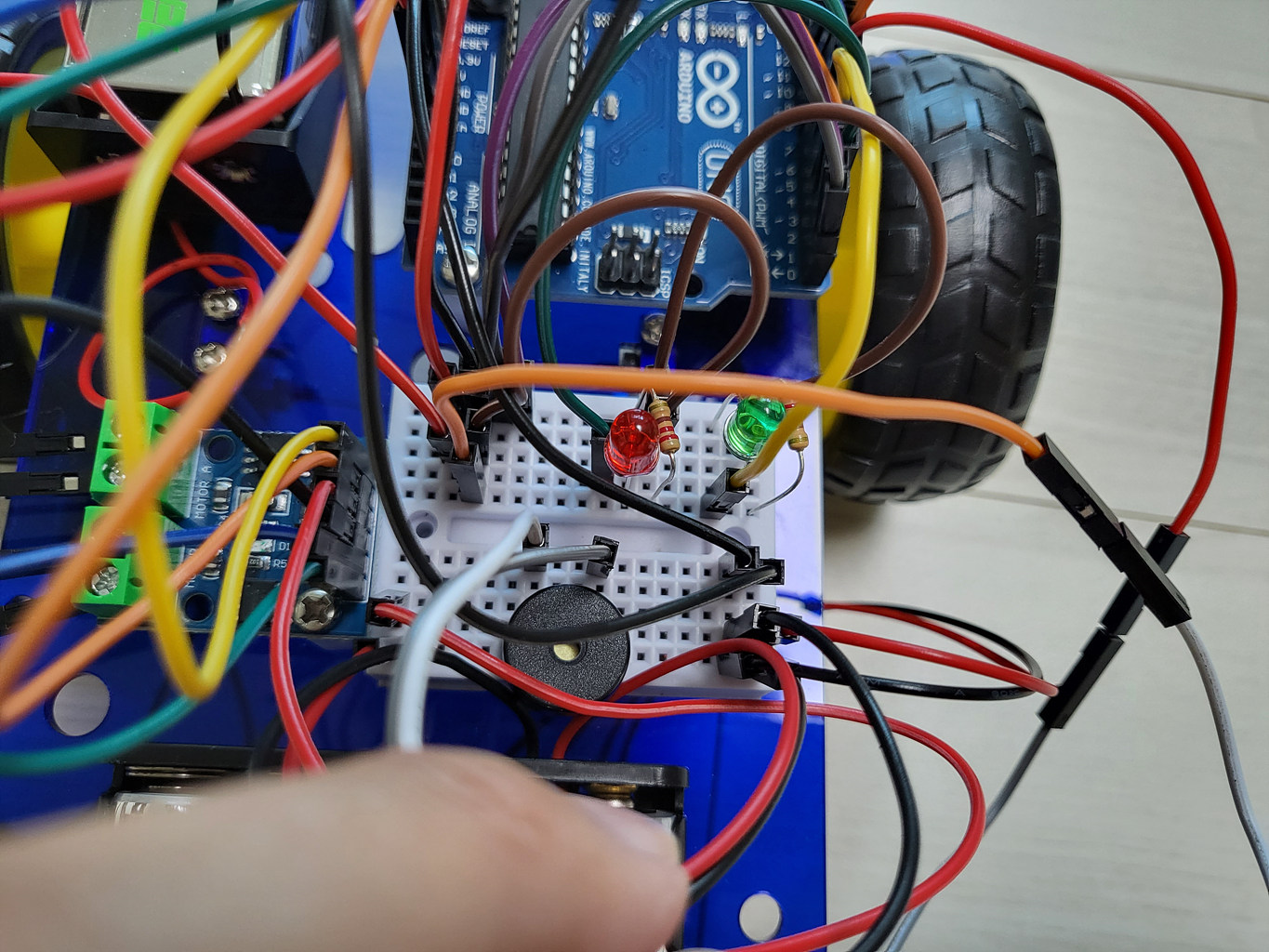
장애물을 발견했을 때 소리를 낼 수 있도록 Buzzer를 연결해 줍니다.
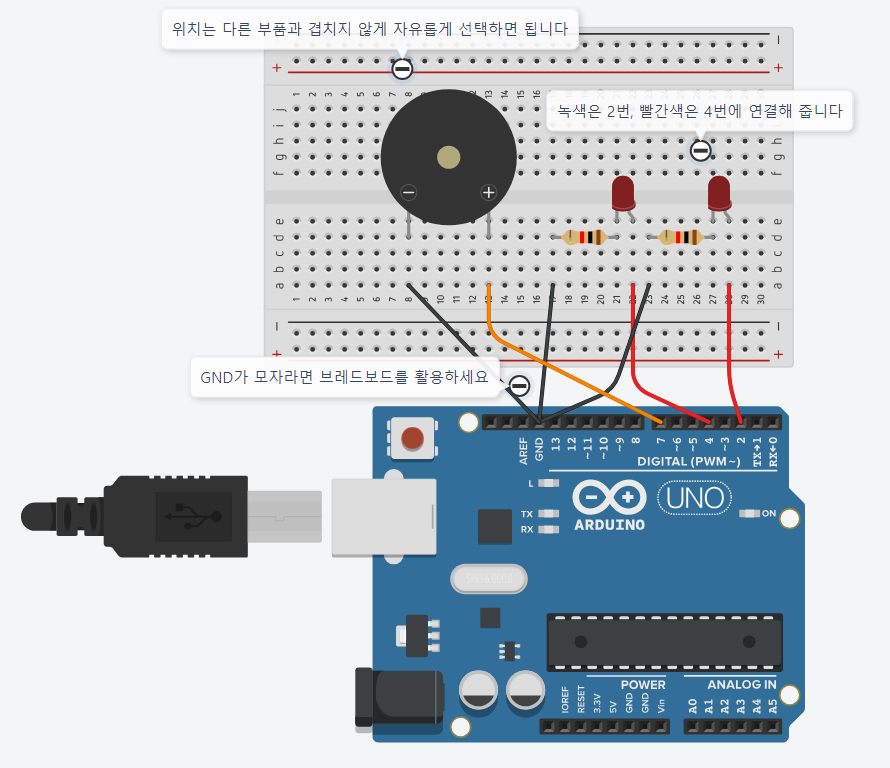
GND 핀이 부족한 경우에는 브레드보드를 사용해서 연결해 줍니다.
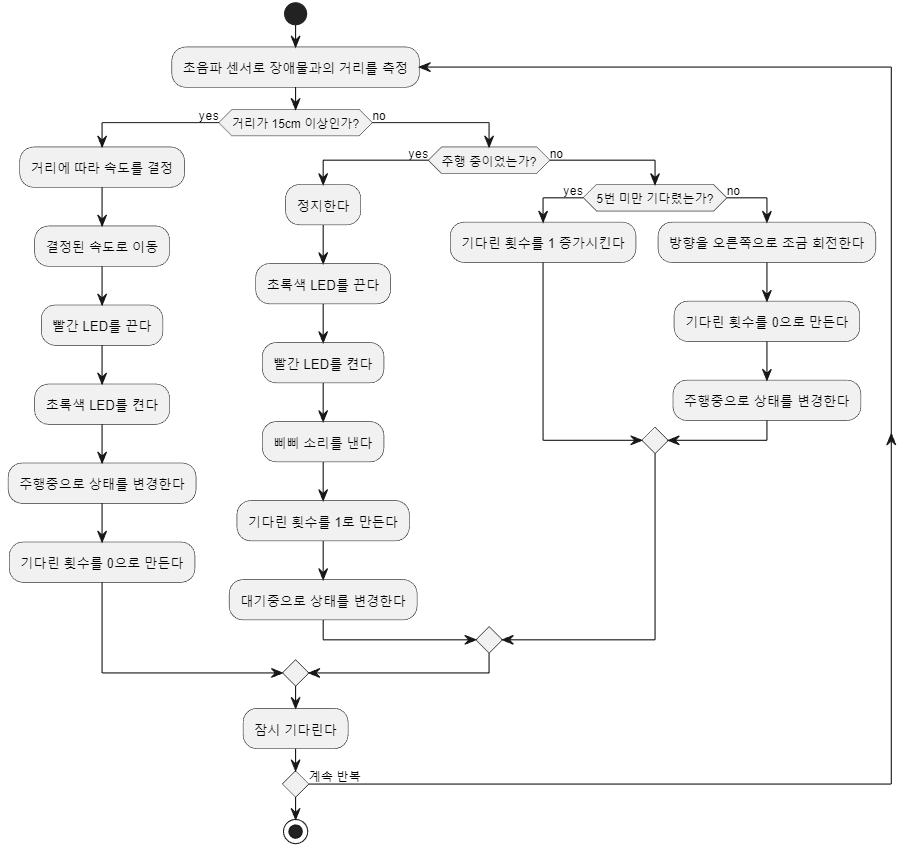
프로그램의 전체 동작을 간단하게 정리하면 다음과 같습니다.
- 초음파 센서로 장애물과의 거리를 측정해서 거리에 따라 속도를 다르게 한다.
- 장애물을 발견하면 LED와 Buzzer를 동작하면서 대기한다.
- 일정 시간동안 대기해도 장애물이 있다면 방향을 전환한다.
- 반복적으로 거리를 측정하면서 스스로 동작한다.
세부 동작을 포함한 순서도는 아래와 같습니다. 매우 복잡해 보이지만 하나씩 차근차근 만들면 완성할 수 있습니다.
전체 프로그램을 모두 완성하기 전에 우선 거리에 따라 속도를 다르게 이동하는 부분만 먼저 구현을 해보겠습니다. 이 부분은 "장애물을 인식 자동차 프로그래밍"에서 구현했던 내용과 동일합니다.
다음과 같이 프로그램을 구성해서 업로드를 하고, 동작을 확인해 봅니다.
코드 내용은 천천히 혼자 스스로 이해해보세요.
#define TRIG_PIN_NUM 9 //TRIG 핀과 연결된 아두이노 핀 번호 (초음파 보내는 핀)
#define ECHO_PIN_NUM 8 //ECHO 핀과 연결된 아두이노 핀 번호 (초음파 받는 핀)
#define STOP_DISTANCE_CM 15 //자동차가 정지하는 기준 거리
#define CHECK_INTERVAL 200 //초음파 센서로 거리를 측정하는 시간 간격
#define MOTOR_A_a 3 //모터A의 +출력핀은 3번핀입니다
#define MOTOR_A_b 11 //모터A의 -출력핀은 11번핀입니다
#define MOTOR_B_a 5 //모터B의 +출력핀은 5번핀입니다
#define MOTOR_B_b 6 //모터B의 -출력핀은 6번핀입니다
#define MOTOR_SPEED_0 0 //모터의 속력을 단계별로 나눴습니다 (0~255)
#define MOTOR_SPEED_1 120
#define MOTOR_SPEED_2 150
#define MOTOR_SPEED_3 170
#define MOTOR_SPEED_4 200
#define MOTOR_SPEED_MAX 250
void setup() { //setup은 처음 한 번 실행되는 함수 입니다.
//모터 제어 핀들을 출력으로 설정합니다.
pinMode(MOTOR_A_a, OUTPUT);
pinMode(MOTOR_A_b, OUTPUT);
pinMode(MOTOR_B_a, OUTPUT);
pinMode(MOTOR_B_b, OUTPUT);
Serial.begin(9600); //시리얼 통신 초기화
Serial.println("Hello!"); //터미널 작동 확인용 문자열
pinMode(TRIG_PIN_NUM, OUTPUT); //TRIG 핀과 연결된 아두이노 핀을 출력으로 설정
pinMode(ECHO_PIN_NUM, INPUT); //ECHO 핀과 연결된 아두이노 핀을 입력으로 설정
}
void loop() { //loop는 계속 반복 실행되는 함수 입니다.
long duration, distance;
//거리를 측정
distance = getDistance();
if (distance > STOP_DISTANCE_CM) {
//속도 계산하기
int speed = getSpeed(distance);
//정해진 속도로 전진하기
driveCarForward(speed);
} else {
waitCar();
}
delay(CHECK_INTERVAL); // CHECK_INTERVAL 만큼 대기
}
void waitCar() {
driveCarForward(MOTOR_SPEED_0); //자동차를 정지합니다.
}
int getSpeed(int distance) {
// 거리에 따라서 속도를 다르게 설정합니다.
if (distance > 100) {
// 100cm보다 멀리 있을 때 설정
return MOTOR_SPEED_MAX;
}
if (distance > 80) {
// 80cm보다 멀리 있을 때 설정
return MOTOR_SPEED_4;
}
if (distance > 50) {
// 50cm보다 멀리 있을 때 설정
return MOTOR_SPEED_3;
}
if (distance > 30) {
// 30cm보다 멀리 있을 때 설정
return MOTOR_SPEED_2;
}
if (distance > 10) {
// 10cm보다 멀리 있을 때 설정
return MOTOR_SPEED_1;
}
// 10cm보다 가까이 있을 때 설정
return MOTOR_SPEED_0;
}
long getDistance() { // 거리를 측정해서 반환하는 함수입니다.
long duration, distance;
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
delayMicroseconds(2); // 2마이크로세컨드(0.000002초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, HIGH); //TRIG 핀의 신호를 HIGH로 설정
delayMicroseconds(10); // 10마이크로세컨드(0.00001초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
duration = pulseIn(ECHO_PIN_NUM, HIGH); //물체에 반사되어돌아온 초음파의 시간을 변수에 저장합니다.
// "pulseIn" Returns the length of the pulse in microseconds or gives up and returns 0 if no complete pulse was received within the timeout.
// 거리를 구하는 공식의 단위를 맞춰서 계산해야 합니다.
// 34000 * 초음파가 물체로 부터 반사되어 돌아오는시간 / 1000000 / 2 (왕복거리이므로 나누기 2를 해줍니다.)
// 각각 m(미터) -> cm(센티미터), s(초) -> micro sec(마이크로 초)
// 식을 정리하면 아래와 같습니다.
distance = duration * 17 / 1000;
return distance;
}
void driveCarForward(unsigned int speed) //차를 전달받은 속도로 전진하는 함수
{
if (speed > 255)
return;
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, speed); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, speed); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, LOW); //모터B- LOW
}
이번에는 앞에서 구현한 프로그램에 LED를 켜고 끄는 부분을 추가해 보겠습니다.
녹색과 빨간색 LED가 연결된 핀에 대해서 설정해 줍니다.
#define LED_GREEN_PIN_NUM 4 // 녹색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define LED_RED_PIN_NUM 2 // 빨간색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
setup에서 출력으로 설정해줍니다.
pinMode(LED_GREEN_PIN_NUM, OUTPUT); // 녹색 LED의 긴다리 핀을 출력으로 설정
pinMode(LED_RED_PIN_NUM, OUTPUT); // 빨간색 LED의 긴다리 핀을 출력으로 설정
만들어서 녹색, 또는 빨간색 LED를 켜는 setLed 함수를 만들어서 호출해 주도록 합니다.
void setLed(bool on, bool isRed) {
if (!on) {
digitalWrite(LED_GREEN_PIN_NUM, LOW); // LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW);
return;
}
if (isRed) { // 빨간색인지 확인합니다.
digitalWrite(LED_GREEN_PIN_NUM, LOW); // 녹색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, HIGH); // 빨간색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
} else {
digitalWrite(LED_GREEN_PIN_NUM, HIGH); // 녹색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW); // 빨간색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
}
}
전체 프로그램을 다음과 같이 구성해서 업로드를 하고, 동작을 확인해 봅니다.
코드 내용은 천천히 혼자 스스로 이해해보세요.
#define LED_GREEN_PIN_NUM 4 // 녹색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define LED_RED_PIN_NUM 2 // 빨간색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define TRIG_PIN_NUM 9 //TRIG 핀과 연결된 아두이노 핀 번호 (초음파 보내는 핀)
#define ECHO_PIN_NUM 8 //ECHO 핀과 연결된 아두이노 핀 번호 (초음파 받는 핀)
#define STOP_DISTANCE_CM 15 //자동차가 정지하는 기준 거리
#define CHECK_INTERVAL 200 //초음파 센서로 거리를 측정하는 시간 간격
#define MOTOR_A_a 3 //모터A의 +출력핀은 3번핀입니다
#define MOTOR_A_b 11 //모터A의 -출력핀은 11번핀입니다
#define MOTOR_B_a 5 //모터B의 +출력핀은 5번핀입니다
#define MOTOR_B_b 6 //모터B의 -출력핀은 6번핀입니다
#define MOTOR_SPEED_0 0 //모터의 속력을 단계별로 나눴습니다 (0~255)
#define MOTOR_SPEED_1 120
#define MOTOR_SPEED_2 150
#define MOTOR_SPEED_3 170
#define MOTOR_SPEED_4 200
#define MOTOR_SPEED_MAX 250
void setup() { //setup은 처음 한 번 실행되는 함수 입니다.
//모터 제어 핀들을 출력으로 설정합니다.
pinMode(MOTOR_A_a, OUTPUT);
pinMode(MOTOR_A_b, OUTPUT);
pinMode(MOTOR_B_a, OUTPUT);
pinMode(MOTOR_B_b, OUTPUT);
Serial.begin(9600); //시리얼 통신 초기화
Serial.println("Hello!"); //터미널 작동 확인용 문자열
pinMode(TRIG_PIN_NUM, OUTPUT); //TRIG 핀과 연결된 아두이노 핀을 출력으로 설정
pinMode(ECHO_PIN_NUM, INPUT); //ECHO 핀과 연결된 아두이노 핀을 입력으로 설정
pinMode(LED_GREEN_PIN_NUM, OUTPUT); // 녹색 LED의 긴다리 핀을 출력으로 설정
pinMode(LED_RED_PIN_NUM, OUTPUT); // 빨간색 LED의 긴다리 핀을 출력으로 설정
}
void loop() { //loop는 계속 반복 실행되는 함수 입니다.
long duration, distance;
//거리를 측정
distance = getDistance();
if (distance > STOP_DISTANCE_CM) {
//속도 계산하기
int speed = getSpeed(distance);
//정해진 속도로 전진하기
driveCarForward(speed);
setLed(true, false); // 녹색 LED를 켭니다.
} else {
waitCar();
}
delay(CHECK_INTERVAL); // CHECK_INTERVAL 만큼 대기
}
void waitCar() {
driveCarForward(MOTOR_SPEED_0); //자동차를 정지합니다.
setLed(true, true); // 빨간색 LED를 켭니다.
}
void setLed(bool on, bool isRed) {
if (!on) {
digitalWrite(LED_GREEN_PIN_NUM, LOW); // LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW);
return;
}
if (isRed) { // 빨간색인지 확인합니다.
digitalWrite(LED_GREEN_PIN_NUM, LOW); // 녹색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, HIGH); // 빨간색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
} else {
digitalWrite(LED_GREEN_PIN_NUM, HIGH); // 녹색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW); // 빨간색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
}
}
int getSpeed(int distance) {
// 거리에 따라서 속도를 다르게 설정합니다.
if (distance > 100) {
// 100cm보다 멀리 있을 때 설정
return MOTOR_SPEED_MAX;
}
if (distance > 80) {
// 80cm보다 멀리 있을 때 설정
return MOTOR_SPEED_4;
}
if (distance > 50) {
// 50cm보다 멀리 있을 때 설정
return MOTOR_SPEED_3;
}
if (distance > 30) {
// 30cm보다 멀리 있을 때 설정
return MOTOR_SPEED_2;
}
if (distance > 10) {
// 10cm보다 멀리 있을 때 설정
return MOTOR_SPEED_1;
}
// 10cm보다 가까이 있을 때 설정
return MOTOR_SPEED_0;
}
long getDistance() { // 거리를 측정해서 반환하는 함수입니다.
long duration, distance;
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
delayMicroseconds(2); // 2마이크로세컨드(0.000002초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, HIGH); //TRIG 핀의 신호를 HIGH로 설정
delayMicroseconds(10); // 10마이크로세컨드(0.00001초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
duration = pulseIn(ECHO_PIN_NUM, HIGH); //물체에 반사되어돌아온 초음파의 시간을 변수에 저장합니다.
// "pulseIn" Returns the length of the pulse in microseconds or gives up and returns 0 if no complete pulse was received within the timeout.
// 거리를 구하는 공식의 단위를 맞춰서 계산해야 합니다.
// 34000 * 초음파가 물체로 부터 반사되어 돌아오는시간 / 1000000 / 2 (왕복거리이므로 나누기 2를 해줍니다.)
// 각각 m(미터) -> cm(센티미터), s(초) -> micro sec(마이크로 초)
// 식을 정리하면 아래와 같습니다.
distance = duration * 17 / 1000;
return distance;
}
void driveCarForward(unsigned int speed) //차를 전달받은 속도로 전진하는 함수
{
if (speed > 255)
return;
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, speed); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, speed); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, LOW); //모터B- LOW
}
이번에는 앞에서 구현한 프로그램에 Buzzer를 이용해서 소리를 내는 부분을 추가하겠습니다.
Buzzer와 연결된 핀과 소리를 낼 주파수 그리고 소리가 나는 시간을 정해줍니다.
#define BUZZER_PIN_NUM 7//아두이노와 연결된 Buzzer 핀 번호
#define BUZZER_FREQUENCY 784 // 5옥타브 솔 주파수
#define BUZZER_DURATION 100 // 삐-소리 나는 시간
짧게 삐-소리를 내는 함수 makeBeep을 만들어서 호출해 주도록 합니다.
void makeBeep() {
// delay 함수가 호출되는 동안에는 다른 동작을 할 수 없기 때문에 삐- 소리를 짧게 내야합니다.
tone(BUZZER_PIN_NUM, BUZZER_FREQUENCY); // BUZZER_FREQUENCY 주파수로 소리재생
delay(BUZZER_DURATION); // BUZZER_DURATION 밀리세컨드 동안 소리재생
noTone(BUZZER_PIN_NUM); // 소리재생 중지
}
전체 프로그램을 다음과 같이 구성해서 업로드를 하고, 동작을 확인해 봅니다.
코드 내용은 천천히 혼자 스스로 이해해보세요.
#define BUZZER_PIN_NUM 7//아두이노와 연결된 Buzzer 핀 번호
#define BUZZER_FREQUENCY 784 // 5옥타브 솔 주파수
#define BUZZER_DURATION 100 // 삐-소리 나는 시간
#define LED_GREEN_PIN_NUM 4 // 녹색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define LED_RED_PIN_NUM 2 // 빨간색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define TRIG_PIN_NUM 9 //TRIG 핀과 연결된 아두이노 핀 번호 (초음파 보내는 핀)
#define ECHO_PIN_NUM 8 //ECHO 핀과 연결된 아두이노 핀 번호 (초음파 받는 핀)
#define STOP_DISTANCE_CM 15 //자동차가 정지하는 기준 거리
#define CHECK_INTERVAL 200 //초음파 센서로 거리를 측정하는 시간 간격
#define MOTOR_A_a 3 //모터A의 +출력핀은 3번핀입니다
#define MOTOR_A_b 11 //모터A의 -출력핀은 11번핀입니다
#define MOTOR_B_a 5 //모터B의 +출력핀은 5번핀입니다
#define MOTOR_B_b 6 //모터B의 -출력핀은 6번핀입니다
#define MOTOR_SPEED_0 0 //모터의 속력을 단계별로 나눴습니다 (0~255)
#define MOTOR_SPEED_1 120
#define MOTOR_SPEED_2 150
#define MOTOR_SPEED_3 170
#define MOTOR_SPEED_4 200
#define MOTOR_SPEED_MAX 250
void setup() { //setup은 처음 한 번 실행되는 함수 입니다.
//모터 제어 핀들을 출력으로 설정합니다.
pinMode(MOTOR_A_a, OUTPUT);
pinMode(MOTOR_A_b, OUTPUT);
pinMode(MOTOR_B_a, OUTPUT);
pinMode(MOTOR_B_b, OUTPUT);
Serial.begin(9600); //시리얼 통신 초기화
Serial.println("Hello!"); //터미널 작동 확인용 문자열
pinMode(TRIG_PIN_NUM, OUTPUT); //TRIG 핀과 연결된 아두이노 핀을 출력으로 설정
pinMode(ECHO_PIN_NUM, INPUT); //ECHO 핀과 연결된 아두이노 핀을 입력으로 설정
pinMode(LED_GREEN_PIN_NUM, OUTPUT); // 녹색 LED의 긴다리 핀을 출력으로 설정
pinMode(LED_RED_PIN_NUM, OUTPUT); // 빨간색 LED의 긴다리 핀을 출력으로 설정
}
void loop() { //loop는 계속 반복 실행되는 함수 입니다.
long duration, distance;
//거리를 측정
distance = getDistance();
if (distance > STOP_DISTANCE_CM) {
//속도 계산하기
int speed = getSpeed(distance);
//정해진 속도로 전진하기
driveCarForward(speed);
setLed(true, false); // 녹색 LED를 켭니다.
} else {
waitCar();
}
delay(CHECK_INTERVAL); // CHECK_INTERVAL 만큼 대기
}
void waitCar() {
driveCarForward(MOTOR_SPEED_0); //자동차를 정지합니다.
setLed(true, true); // 빨간색 LED를 켭니다.
makeBeep(); // 삐- 소리를 짧게 재생합니다.
}
void makeBeep() {
// delay 함수가 호출되는 동안에는 다른 동작을 할 수 없기 때문에 삐- 소리를 짧게 내야합니다.
tone(BUZZER_PIN_NUM, BUZZER_FREQUENCY); // BUZZER_FREQUENCY 주파수로 소리재생
delay(BUZZER_DURATION); // BUZZER_DURATION 밀리세컨드 동안 소리재생
noTone(BUZZER_PIN_NUM); // 소리재생 중지
}
void setLed(bool on, bool isRed) {
if (!on) {
digitalWrite(LED_GREEN_PIN_NUM, LOW); // LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW);
return;
}
if (isRed) { // 빨간색인지 확인합니다.
digitalWrite(LED_GREEN_PIN_NUM, LOW); // 녹색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, HIGH); // 빨간색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
} else {
digitalWrite(LED_GREEN_PIN_NUM, HIGH); // 녹색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW); // 빨간색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
}
}
int getSpeed(int distance) {
// 거리에 따라서 속도를 다르게 설정합니다.
if (distance > 100) {
// 100cm보다 멀리 있을 때 설정
return MOTOR_SPEED_MAX;
}
if (distance > 80) {
// 80cm보다 멀리 있을 때 설정
return MOTOR_SPEED_4;
}
if (distance > 50) {
// 50cm보다 멀리 있을 때 설정
return MOTOR_SPEED_3;
}
if (distance > 30) {
// 30cm보다 멀리 있을 때 설정
return MOTOR_SPEED_2;
}
if (distance > 10) {
// 10cm보다 멀리 있을 때 설정
return MOTOR_SPEED_1;
}
// 10cm보다 가까이 있을 때 설정
return MOTOR_SPEED_0;
}
long getDistance() { // 거리를 측정해서 반환하는 함수입니다.
long duration, distance;
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
delayMicroseconds(2); // 2마이크로세컨드(0.000002초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, HIGH); //TRIG 핀의 신호를 HIGH로 설정
delayMicroseconds(10); // 10마이크로세컨드(0.00001초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
duration = pulseIn(ECHO_PIN_NUM, HIGH); //물체에 반사되어돌아온 초음파의 시간을 변수에 저장합니다.
// "pulseIn" Returns the length of the pulse in microseconds or gives up and returns 0 if no complete pulse was received within the timeout.
// 거리를 구하는 공식의 단위를 맞춰서 계산해야 합니다.
// 34000 * 초음파가 물체로 부터 반사되어 돌아오는시간 / 1000000 / 2 (왕복거리이므로 나누기 2를 해줍니다.)
// 각각 m(미터) -> cm(센티미터), s(초) -> micro sec(마이크로 초)
// 식을 정리하면 아래와 같습니다.
distance = duration * 17 / 1000;
return distance;
}
void driveCarForward(unsigned int speed) //차를 전달받은 속도로 전진하는 함수
{
if (speed > 255)
return;
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, speed); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, speed); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, LOW); //모터B- LOW
}
이번에는 마지막으로 5회(5초이상) 기다렸다가 장애물을 피해가는 기능을 추가해보갰습니다.
현재 주행중인지 확인하는 변수와 몇 번 기다렸는지 기억하는 변수를 추가해 줍니다. 두 개의 변수는 loop() 가 끝나도 상태를 기억하고 있어야 하므로 loop() 함수 밖에 추가해 줍니다. 이런 변수를 전역 변수라고 합니다.
bool isMoving = false;
int waitingCount = 0;
자동차를 오른쪽으로 조금 회전하는 함수 turnRight를 만들어서 사용하도록 합니다.
void turnRight() {
//두 모터를 반대 방향으로 돌립니다.
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, MOTOR_SPEED_3); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, LOW); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, MOTOR_SPEED_3); //모터B- LOW
delay(300); // 0.3초 동안 회전합니다.
//모터를 정지합니다.
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, MOTOR_SPEED_0); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, MOTOR_SPEED_0); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, LOW); //모터B- LOW
}
자동차와 장애물의 거리가 가까울때 기다리는 동작을 처리하는 waitCar함수에 내용을 채워줍니다. 이로써 복잡해 보였던 전체 프로그램을 모두 완성하였습니다!
void waitCar() {
if (isMoving) { // 주행중 상태인지 체크합니다.
driveCarForward(MOTOR_SPEED_0); //자동차를 정지합니다.
setLed(true, false); // 빨간색 LED를 켭니다.
makeBeep(); // 삐- 소리를 짧게 재생합니다.
waitingCount = 1; // 기다린 횟수를 1로 만듭니다.
isMoving = false;
} else {
if (waitingCount < WAINTING_COUNT) {
waitingCount = waitingCount + 1;
} else {
turnRight(); //자동차를 오른쪽으로 회전합니다.
waitingCount = 0; // 기다린 횟수를 0로 만듭니다.
isMoving = true; // 주행중 상태로 변경합니다.
}
}
}
전체 프로그램을 다음과 같이 구성해서 업로드를 하고, 동작을 확인해 봅니다.
코드 내용은 천천히 혼자 스스로 이해해보세요.
#define BUZZER_PIN_NUM 7//아두이노와 연결된 Buzzer 핀 번호
#define BUZZER_FREQUENCY 784 // 5옥타브 솔 주파수
#define BUZZER_DURATION 100 // 삐-소리 나는 시간
#define CHECK_INTERVAL 200 //초음파 센서로 거리를 측정하는 시간 간격
#define WAINTING_COUNT 5
#define LED_GREEN_PIN_NUM 4 // 녹색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define LED_RED_PIN_NUM 2 // 빨간색 LED의 긴다리 핀과 연결된 아두이노 핀 번호 (+핀)
#define TRIG_PIN_NUM 9 //TRIG 핀과 연결된 아두이노 핀 번호 (초음파 보내는 핀)
#define ECHO_PIN_NUM 8 //ECHO 핀과 연결된 아두이노 핀 번호 (초음파 받는 핀)
#define STOP_DISTANCE_CM 15 //자동차가 정지하는 기준 거리
#define MOTOR_A_a 3 //모터A의 +출력핀은 3번핀입니다
#define MOTOR_A_b 11 //모터A의 -출력핀은 11번핀입니다
#define MOTOR_B_a 5 //모터B의 +출력핀은 5번핀입니다
#define MOTOR_B_b 6 //모터B의 -출력핀은 6번핀입니다
#define MOTOR_SPEED_0 0 //모터의 속력을 단계별로 나눴습니다 (0~255)
#define MOTOR_SPEED_1 120
#define MOTOR_SPEED_2 150
#define MOTOR_SPEED_3 170
#define MOTOR_SPEED_4 200
#define MOTOR_SPEED_MAX 250
bool isMoving = false;
int waitingCount = 0;
void setup() { //setup은 처음 한 번 실행되는 함수 입니다.
//모터 제어 핀들을 출력으로 설정합니다.
pinMode(MOTOR_A_a, OUTPUT);
pinMode(MOTOR_A_b, OUTPUT);
pinMode(MOTOR_B_a, OUTPUT);
pinMode(MOTOR_B_b, OUTPUT);
Serial.begin(9600); //시리얼 통신 초기화
Serial.println("Hello!"); //터미널 작동 확인용 문자열
pinMode(TRIG_PIN_NUM, OUTPUT); //TRIG 핀과 연결된 아두이노 핀을 출력으로 설정
pinMode(ECHO_PIN_NUM, INPUT); //ECHO 핀과 연결된 아두이노 핀을 입력으로 설정
pinMode(LED_GREEN_PIN_NUM, OUTPUT); // 녹색 LED의 긴다리 핀을 출력으로 설정
pinMode(LED_RED_PIN_NUM, OUTPUT); // 빨간색 LED의 긴다리 핀을 출력으로 설정
}
void loop() { //loop는 계속 반복 실행되는 함수 입니다.
long duration, distance;
//거리를 측정
distance = getDistance();
if (distance > STOP_DISTANCE_CM) {
//속도 계산하기
int speed = getSpeed(distance);
//정해진 속도로 전진하기
driveCarForward(speed);
Serial.print(distance); //터미널 작동 확인용 문자열
Serial.print(" moving "); //터미널 작동 확인용 문자열
Serial.println(speed); //터미널 작동 확인용 문자열
setLed(true, false); // 녹색 LED를 켭니다.
waitingCount = 0; // 기다린 횟수를 0로 만듭니다.
isMoving = true; // 주행중 상태로 변경합니다.
} else {
waitCar();
}
delay(CHECK_INTERVAL); // CHECK_INTERVAL 만큼 대기
}
void waitCar() {
Serial.print(isMoving); //터미널 작동 확인용 문자열
Serial.print(" waiting "); //터미널 작동 확인용 문자열
Serial.println(waitingCount); //터미널 작동 확인용 문자열
if (isMoving) { // 주행중 상태인지 체크합니다.
driveCarForward(MOTOR_SPEED_0); //자동차를 정지합니다.
setLed(true, true); // 빨간색 LED를 켭니다.
makeBeep(); // 삐- 소리를 짧게 재생합니다.
waitingCount = 1; // 기다린 횟수를 1로 만듭니다.
isMoving = false;
} else {
if (waitingCount < WAINTING_COUNT) {
waitingCount = waitingCount + 1;
} else {
turnRight(); //자동차를 오른쪽으로 회전합니다.
waitingCount = 0; // 기다린 횟수를 0로 만듭니다.
isMoving = true; // 주행중 상태로 변경합니다.
}
}
}
void turnRight() {
Serial.println("turnRight"); //터미널 작동 확인용 문자열
//두 모터를 반대 방향으로 돌립니다.
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, MOTOR_SPEED_3); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, LOW); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, MOTOR_SPEED_3); //모터B- LOW
delay(300); // 0.5초 동안 이동합니다.
//모터를 정지합니다.
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, MOTOR_SPEED_0); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, MOTOR_SPEED_0); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, LOW); //모터B- LOW
}
void makeBeep() {
// delay 함수가 호출되는 동안에는 다른 동작을 할 수 없기 때문에 삐- 소리를 짧게 내야합니다.
tone(BUZZER_PIN_NUM, BUZZER_FREQUENCY); // BUZZER_FREQUENCY 주파수로 소리재생
delay(BUZZER_DURATION); // BUZZER_DURATION 밀리세컨드 동안 소리재생
noTone(BUZZER_PIN_NUM); // 소리재생 중지
}
void setLed(bool on, bool isRed) {
Serial.print(on); //터미널 작동 확인용 문자열
Serial.print(" LED "); //터미널 작동 확인용 문자열
Serial.println(isRed); //터미널 작동 확인용 문자열
if (!on) {
digitalWrite(LED_GREEN_PIN_NUM, LOW); // LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW);
return;
}
if (isRed) { // 빨간색인지 확인합니다.
digitalWrite(LED_GREEN_PIN_NUM, LOW); // 녹색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, HIGH); // 빨간색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
} else {
digitalWrite(LED_GREEN_PIN_NUM, HIGH); // 녹색 LED와 연결된 핀의 출력을 HIGH로 설정합니다.
digitalWrite(LED_RED_PIN_NUM, LOW); // 빨간색 LED와 연결된 핀의 출력을 LOW로 설정합니다.
}
}
int getSpeed(int distance) {
// 거리에 따라서 속도를 다르게 설정합니다.
if (distance > 100) {
// 100cm보다 멀리 있을 때 설정
return MOTOR_SPEED_MAX;
}
if (distance > 80) {
// 80cm보다 멀리 있을 때 설정
return MOTOR_SPEED_4;
}
if (distance > 50) {
// 50cm보다 멀리 있을 때 설정
return MOTOR_SPEED_3;
}
if (distance > 30) {
// 30cm보다 멀리 있을 때 설정
return MOTOR_SPEED_2;
}
if (distance > 10) {
// 10cm보다 멀리 있을 때 설정
return MOTOR_SPEED_1;
}
// 10cm보다 가까이 있을 때 설정
return MOTOR_SPEED_0;
}
long getDistance() { // 거리를 측정해서 반환하는 함수입니다.
long duration, distance;
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
delayMicroseconds(2); // 2마이크로세컨드(0.000002초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, HIGH); //TRIG 핀의 신호를 HIGH로 설정
delayMicroseconds(10); // 10마이크로세컨드(0.00001초) 대기, 센서의 동작을 기다림
digitalWrite(TRIG_PIN_NUM, LOW); //TRIG 핀의 신호를 LOW로 설정
duration = pulseIn(ECHO_PIN_NUM, HIGH); //물체에 반사되어돌아온 초음파의 시간을 변수에 저장합니다.
// "pulseIn" Returns the length of the pulse in microseconds or gives up and returns 0 if no complete pulse was received within the timeout.
// 거리를 구하는 공식의 단위를 맞춰서 계산해야 합니다.
// 34000 * 초음파가 물체로 부터 반사되어 돌아오는시간 / 1000000 / 2 (왕복거리이므로 나누기 2를 해줍니다.)
// 각각 m(미터) -> cm(센티미터), s(초) -> micro sec(마이크로 초)
// 식을 정리하면 아래와 같습니다.
distance = duration * 17 / 1000;
return distance;
}
void driveCarForward(unsigned int speed) //차를 전달받은 속도로 전진하는 함수
{
if (speed > 255)
return;
digitalWrite(MOTOR_A_a, LOW); //모터A+ LOW
analogWrite(MOTOR_A_b, speed); //모터A-의 속력을 PWM 출력
analogWrite(MOTOR_B_a, speed); //모터B+의 속력을 PWM 출력
digitalWrite(MOTOR_B_b, LOW); //모터B- LOW
}
장애물을 탐지해서 주행 속도를 결정하고, LED와 Buzzer를 이용해서 빛과 소리로 상태를 알려주는 프로그램을 작성하였습니다. 상당히 복잡한 프로그램이지만 차근차근 기능을 추가하면서 완성하였습니다.
아무리 어렵고 힘든 일이라고 차근차근 하다보면 성공할 수 있다는 것을 잊지 마세요!
프로그램에 대해서 아주 간단하게 설명했는데, 스스로 이해해보고 또 궁금한 것은 인터넷을 찾아보면서 공부해 보세요.
- LED 회로와 Buzzer 회로를 연결해 주었습니다.
- 프로그램이 어떻게 동작하는지 프로그래밍 전에 먼저 정리해보세요.
- 복잡한 프로그램이라도 기능 별로 함수를 만들어서 사용하면 좀 더 편해요.